




Integrazione di camera è LiDAR per una rilevazione precisa
Recentemente, una squadra scientifica giapponese hà sviluppatu un unicucamera LiDARsensore di fusione, chì hè u primu LiDAR di u mondu chì allinea l'assi ottici di una camera è LiDAR in un unicu sensore. Stu cuncepimentu unicu permette a raccolta in tempu reale di dati di sovrapposizione senza parallasse. A so densità di irradiazione laser hè più alta di tutti i sensori radar laser in u mondu, chì permette a rilevazione di oggetti à longa distanza è di alta precisione.
Di solitu, u LiDAR hè adupratu in cunghjunzione cù e camere per identificà l'uggetti cù più precisione, ma ci hè una disparità in i dati ottenuti da diverse unità, chì risulta in ritardi di calibrazione trà i sensori. U sensore di fusione appena sviluppatu integra a camera è u LiDAR d'alta risoluzione in una sola unità, ottenendu l'integrazione di dati in tempu reale senza parallasse, assicurendu risultati efficienti è precisi.
L'integrazione di a camera è di u LiDAR permette un ricunniscimentu precisu di l'uggetti. A squadra utilizza una tecnulugia unica di cuncepimentu otticu per integrà a camera è u LiDAR in un'unità cù l'asse otticu allineatu, chì permette l'integrazione in tempu reale di i dati di l'immagine di a camera è di i dati di distanza LiDAR, ottenendu u ricunniscimentu di l'uggetti u più avanzatu finu à oghje.radar laserCù una risoluzione ultra-alta cumminata cù u sensore di fusione cù a più alta densità di emissione laser di u mondu, hà aumentatu a densità di u fasciu laser emessu, chì pò identificà picculi ostaculi à longhe distanze, migliurendu cusì a risoluzione è a precisione. U so sensore innovativu hà una densità di irradiazione di 0,045 gradi è utilizza a tecnulugia proprietaria di unità di scansione laser di stampanti multifunzionali (MFP) è stampanti per rilevà oggetti chì cadenu finu à 30 centimetri à una distanza di 100 metri.
L'alta durabilità è u radar laser à specchiu MEMS pruprietariu richiedenu specchi o motori MEMS per irradiàlasernantu à una zona larga è ad alta densità. Tuttavia, a risoluzione di i specchi MEMS hè generalmente bassa, è u mutore si consuma spessu rapidamente. Stu novu sensore integratu furnisce una risoluzione più alta cà i sistemi basati nantu à u mutore è una maggiore durabilità cà i specchi MEMS tradiziunali. I scientifichi utilizanu a fabricazione avanzata, a tecnulugia di imballaggio ceramicu è a tecnulugia di scansione laser ad alta risoluzione per sviluppà specchi MEMS proprietari per supportà u rilevamentu di alta precisione in varie industrie cum'è veiculi autonomi, navi, macchine pesanti, ecc.
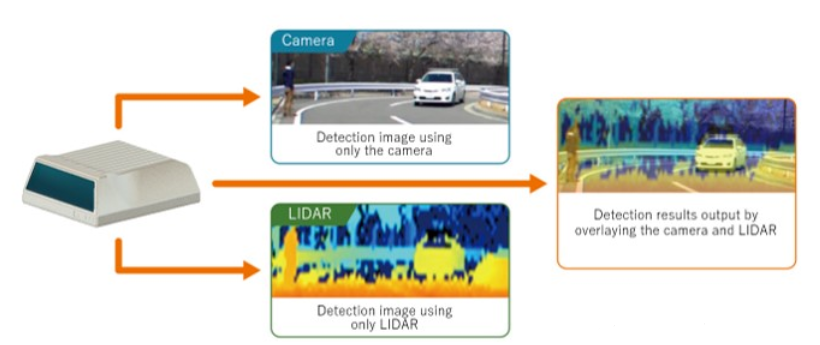
FIG1: Imagine rilevata da u sensore di fusione LiDAR di a camera
Data di publicazione: 10 di ferraghju 2025